Как то совпало, что с момента начала моего более серьезного ковыряния STM32, ST electronics решили отказаться от библиотеки SPL, которую я использовал в предыдущих статьях. Думаю инфа не первой свежести. Тем не менее, ковырять новое детище решил не сразу, поэтому в последнее время просто наблюдал за развитием ситуации.
Для тех кто не в курсе. На текущий момент для инициализации и работы периферии имеются следующие варианты:
1. Использовать регистры (CMSIS)
2. Продолжать использовать SPL
3. Использовать HAL
4. Изобретать свой велосипед
1. В принципе идея такая же, как используется в AVR, т.е. есть портD нужно включить 12 ножку, то делаем так:
GPIOD->BSRRL = GPIO_BSRR_BS_12; |
Но это еще более менее понятная запись, обычно начинающим выносят мозг такие записи:
RCC->AHB1ENR |= RCC_AHB1ENR_GPIODEN; |
Повторюсь, подобный же подход используется в AVR, там с этим нет проблем, ибо настроек не так много как у STM. В целом подобный подход подразумевает чтение даташита и все бы хорошо, но проблема в том, что его практически никто не читает, кроме того нет переносимости кода между разными сериями.
Тем не менее, решил испробовать. Честно открыл даташит, нашел страницу с описанием инициализации и написал код. Не заработало, причина не важна, сама суть в том, что пришлось гуглить и ковыряться внутренностях той же SPL, чтобы понять проблему. В итоге оказалось, что информация разбросана по даташиту в нескольких местах, поэтому требуются танцы с бубном.
С точки зрения общего развития это хорошо, много нового узнал, но конкретно в тот момент нужно было по быстрому родить простой кусок кода и вместо 5 минут потратил около часа. Конечно в следующий раз, ковыряться уже не нужно будет, но могут быть и более сложные вещи на изучение которых можно потратить намного больше времени. В общем данное занятие на любителя.
2. Хоть SPL и не рекомендуется к употреблению, но с ее использованием написано уже много примеров и она есть для основных для меня 103 и 407 серии. Ее подход мне вполне понятен, на ней проще учиться. Для рядового радиолюбителя, который планирует использовать ограниченный потенциал микроконтроллера в принципе большего и не надо. Но опять же столкнулся с тем, что перенос кода между 103 и 407 требует внимательной правки ручками и долбления в даташит.
3. Новое детище ST, которое пришло на смену SPL. Где то видел мнение, что HAL это обертка над SPL. Ради интереса поковырялся, некоторые куски действительно похожи, но в большинстве своем совершенно разные. Хорош HAL тем, что он используется с Cube Mx — генератором кода для STM, некий аналог CAVR для AVR, т.е. проект можно сгенерить парой кликов мышки. Тогда почему просто не использовать HAL? Проще всего ответить на этот вопрос так: сгенерируй проект и посмотри на код, если нет рвотных позывов, то милости просим. Лично по мне, наворочено много лишнего, там где это не нужно, хотя это скорее дело привычки.
4. Ну и тем кому не нравятся библиотеки от ST изобретают свой велосипед. Вероятно, если бы я работал только с одной серией и рожал много прошивок, то выбрал бы именно этот подход.
В итоге, можно считать, что ситуация закончилась победой HAL, ибо Keil и Cocox полностью избавились от SPL. Понемногу появляются статьи с использованием HAL. Но в общем то кто как хочет, тот так и .. программирует. Честно сказать, то что генерирует Cube Mx это нечто монстроидальное, тяжело тупить в такой код.
Тем не менее, решил потихоньку вливаться в мейнстрим, исключительно ради спортивного интереса. Но чтобы не начинать снова со 100500 мигания светодиодом, затарился парочкой простых микросхем. Первой из них и самым простым будет цифровой резистор AD8400. Почему именно он? Да хз, что было то и взял.
Вкратце что это такое? Похоже очень на простой резистор, у которого есть два крайних вывода A1 и B2 между которыми постоянное сопротивление, и щетка W1 положение которой мы можем изменять.
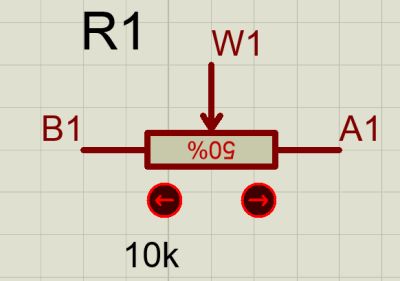
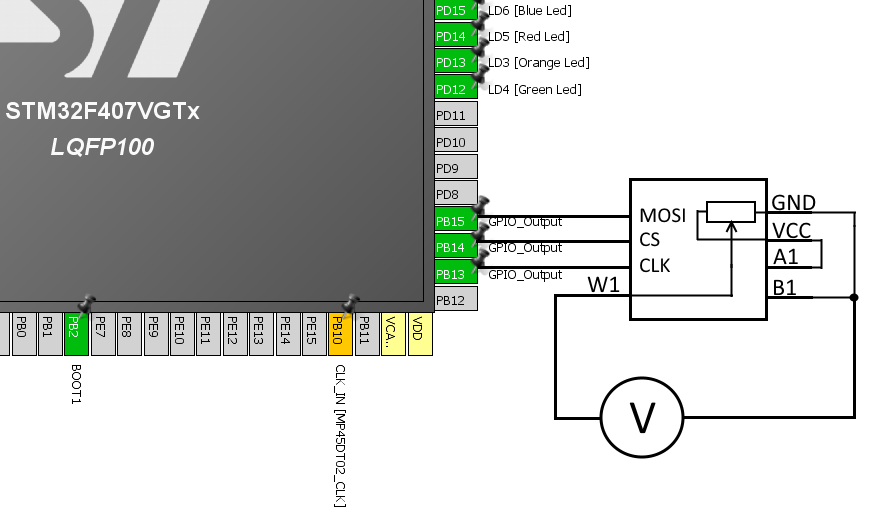
Управляется он по SPI протоколу. Поэтому я подключил его так, чтобы с W1 можно было снимать напряжение:
Тот резистор, что есть у меня одноканальный, т.е. в одном корпусе один резистор, но есть такие же с двумя и четырьмя резисторами в одном корпусе. Бывают на 1, 10, 50, 100кОм. Хоть и было заявлено номинальное сопротивление 10кОм, на практике оно оказалось 8кОм, прозвонить его можно только когда подано питание. После включения на щетке будет рандомное значение.
Управление хоть и SPI, но по факту железный spi задействовать не удастся, ибо вначале идут 2 бита адреса, а затем 8 бит данных. В итоге за один раз нужно передавать 10бит. Весь диапазон резистора разбит на 256 значений, для 10кОм шаг будет в ~40 Ом.
Алгоритм работы будет следующий:
1. Прижимаем ножку CS к земле
2. С каждым тактом CLK выдаем 2 нуля на ножке MOSI
3. C каждым тактом CLK выдаем 8 бит данных на ножке MOSI
4. Поднимаем ножку CS
Для управления использовал программный spi. Сгенерил проект в Cube — тупо настроил PB13-PB15 как выходы. Лень было заморачиваться, поэтому сразу после включения, однократно посылаем байт на резистор. Для желающих можно, включить фантазию, например регулировать уровень звука с помощью энкодера или кнопки. Привожу два варианта кода, для SPL и HAL исключительно для сравнения, в последующих статья планирую юзать только HAL. Исходники прикреплять не буду, ибо 35мб для пустого кода больно жирновато. Тестировалось на STM32F4Discovery.
Для SPL
#include <stm32f4xx.h> #include <stm32f4xx_gpio.h> #include <stm32f4xx_rcc.h> //1.B1 - GND //2.GND //3.CS - PB14 //4.SDI(MOSI) - PB15 //5.CLK - PB13 //6.VDD - //7.W1 - test point //8.A1 - VCC // режим SPI / SPI MODE = 0 // назначение выводов порта #define SPI_SCK GPIO_Pin_13 // выход - SCLK #define SPI_SDI GPIO_Pin_15 // выход - MOSI #define SPI_SS GPIO_Pin_14 // выход - Chip Select #define SPI_PORT GPIOB // порт spi void _spi_start(void) { GPIO_ResetBits(SPI_PORT,SPI_SCK); // SPI_MODE = 0 GPIO_ResetBits(SPI_PORT,SPI_SS); // Chip Select - Enable } void _spi_stop(void) { GPIO_SetBits(SPI_PORT,SPI_SS); // Chip Select - Disable GPIO_ResetBits(SPI_PORT,SPI_SCK); // SPI_MODE = 0 } void _spi_init(void) { RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); GPIO_InitTypeDef s_SDI; s_SDI.GPIO_Mode = GPIO_Mode_OUT; s_SDI.GPIO_OType = GPIO_OType_PP; s_SDI.GPIO_Pin = SPI_SDI; s_SDI.GPIO_Speed = GPIO_Speed_2MHz; GPIO_Init(SPI_PORT, &s_SDI); GPIO_InitTypeDef s_SCK; s_SCK.GPIO_Mode = GPIO_Mode_OUT; s_SCK.GPIO_OType = GPIO_OType_PP; s_SCK.GPIO_Pin = SPI_SCK; s_SCK.GPIO_Speed = GPIO_Speed_2MHz; GPIO_Init(SPI_PORT, &s_SCK); GPIO_InitTypeDef s_SS; s_SS.GPIO_Mode = GPIO_Mode_OUT; s_SS.GPIO_OType = GPIO_OType_PP; s_SS.GPIO_Pin = SPI_SS; s_SS.GPIO_Speed = GPIO_Speed_2MHz; GPIO_Init(SPI_PORT, &s_SS); } void _spi_sendbyte(unsigned char a) { unsigned char i; // отправить адрес 00 for(i=0; i<2; i++) { GPIO_ResetBits(SPI_PORT,SPI_SDI); GPIO_SetBits(SPI_PORT,SPI_SCK); GPIO_ResetBits(SPI_PORT,SPI_SCK); } for(i=0; i<8; i++) { if (a & 0x80) { GPIO_SetBits(SPI_PORT,SPI_SDI); } else { GPIO_ResetBits(SPI_PORT,SPI_SDI); } GPIO_SetBits(SPI_PORT,SPI_SCK); a <<= 1; GPIO_ResetBits(SPI_PORT,SPI_SCK); } } int main(void) { _spi_init(); _spi_start(); _spi_sendbyte(127); _spi_stop(); while (1); } |
С использованием HAL
#include "stm32f4xx_hal.h" void SystemClock_Config(void); static void MX_GPIO_Init(void); #define SPI_SCK GPIO_PIN_13 //SCLK #define SPI_SDI GPIO_PIN_15 //MOSI #define SPI_SS GPIO_PIN_14 //Chip Select #define SPI_PORT GPIOB //spi void _spi_start(void) { HAL_GPIO_WritePin(SPI_PORT,SPI_SCK,GPIO_PIN_RESET); HAL_GPIO_WritePin(SPI_PORT,SPI_SS,GPIO_PIN_RESET); } void _spi_stop(void) { HAL_GPIO_WritePin(SPI_PORT,SPI_SS,GPIO_PIN_SET); HAL_GPIO_WritePin(SPI_PORT,SPI_SCK,GPIO_PIN_RESET); } void _spi_sendbyte(unsigned char d) { unsigned char i; for(i=0; i<2; i++) { HAL_GPIO_WritePin(SPI_PORT,SPI_SDI,GPIO_PIN_RESET); HAL_GPIO_WritePin(SPI_PORT,SPI_SCK,GPIO_PIN_SET); HAL_GPIO_WritePin(SPI_PORT,SPI_SCK,GPIO_PIN_RESET); } for(i=0; i<8; i++) { if (d & 0x80) { HAL_GPIO_WritePin(SPI_PORT,SPI_SDI,GPIO_PIN_SET); } else { HAL_GPIO_WritePin(SPI_PORT,SPI_SDI,GPIO_PIN_RESET); } HAL_GPIO_WritePin(SPI_PORT,SPI_SCK,GPIO_PIN_SET); d <<= 1; HAL_GPIO_WritePin(SPI_PORT,SPI_SCK,GPIO_PIN_RESET); } } int main(void) { HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); _spi_start(); _spi_sendbyte(64); _spi_stop(); while (1); } void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct; RCC_ClkInitTypeDef RCC_ClkInitStruct; __PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2); RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; HAL_RCC_OscConfig(&RCC_OscInitStruct); RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1 |RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSE; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0); } void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __GPIOB_CLK_ENABLE(); /*Configure GPIO pins : PB12 PB13 PB14 PB15 */ GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_LOW; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); } |
Питание 2.9В, отправленный байт 64, если пересчитать (2.9*64)/256 = 0,725В весьма похоже на то, что показал прибор на выходе.

В общем таки, если присмотреться то большой разницы нет, поэтому буду потихоньку переползать. Есть мнение что HAL содержит кучу багов, которые регулярно исправляются, поэтому рекомендую почаще обновляться.
Один комментарий: Цифровой резистор AD8400. Немного про HAL
Добавить комментарий


Ого на що натрапив. Це ж треба 🙂 Дякую велике. Я вчився по вашим прикладам вісім років тому 😀