Данный урок будет достаточно простым. Надеюсь, вы хорошо усвоили прошлые материалы: урок по таймерам и управление кнопками.
Чтобы понять зачем нужны внешние прерывания, приведу простой пример: допустим у вас в основном цикле программы используются задержки (например, для мигания светодиодом), при этом вам кнопкой нужно перевести работу светодиода в другой режим. Если обработка кнопки находится в основном цикле, то придется ждать пока не отработают все фрагменты кода и очередь не дойдет до обработки кнопки. Иногда это не удобно.
Поэтому в микроконтроллерах придумали такую удобную вещь, как внешнее прерывание. Это значит, что при подаче сигнала на ножку микроконтроллера, основная программа остановится и начнет выполняться такой код, который вы напишите в функции прерывания. После выполнения данной функции, основная программа продолжит выполняться с места, где ее прервали.
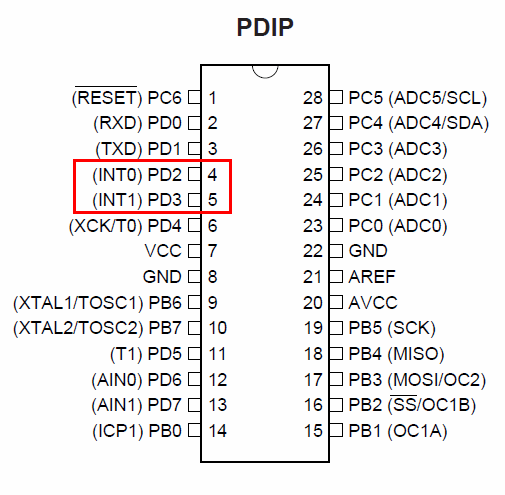
Количество ножек, отведенных для внешних прерываний, зависит от типа микроконтроллера, например у atmega8 их 2, у atmega16 их 3. Называются они INT0, INT1 и т.п.
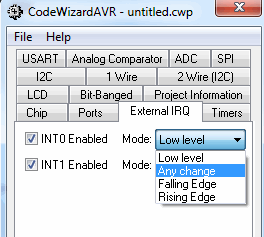
Срабатывать прерывание может по нарастанию сигнала Rise edge, по спаду Falling edge, по любому изменению Any change, Low level по низкому уровню. В визарде выглядит так:
Теперь рассмотрим, как пример, необычное использование внешнего прерывания — частотомер.
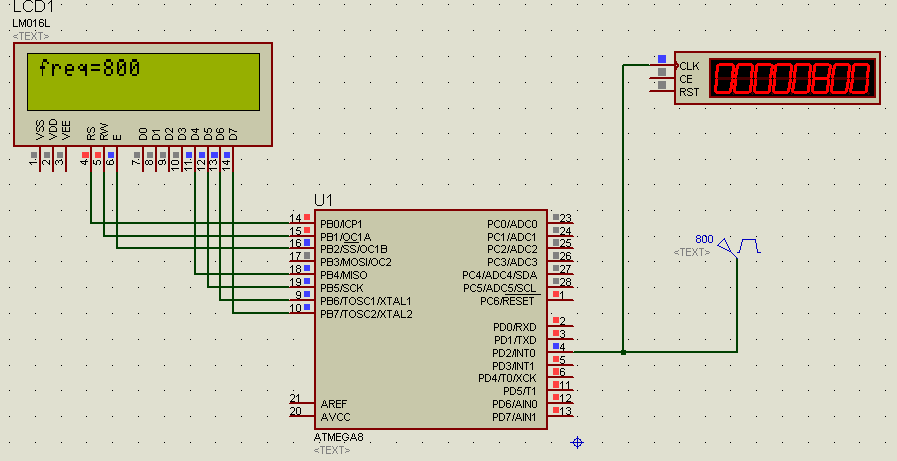
Допустим, на ножку настроенную на внешнее прерывание, по нарастанию фронта, подается пульсирующий сигнал. Соответственно каждый период будет срабатывать прерывание, нам остается только подсчитывать их количество за одну секунду.
Для этого настроим таймер 1 на срабатывание 1 раз в секунду, как в 5 уроке. При срабатывании прерывания таймера, обнуляем счетчик и выводим результат на дисплей.
#include <mega8.h> // Alphanumeric LCD Module functions #asm .equ __lcd_port=0x18 ;PORTB #endasm #include <lcd.h> #include <stdio.h> unsigned long i = 0, freq=0; char lcd_buf[33]; interrupt [EXT_INT0] void ext_int0_isr(void) { i++; } interrupt [TIM1_COMPA] void timer1_compa_isr(void) { freq=i; i=0; TCNT1H=0x00; TCNT1L=0x00; } void main(void) { // Declare your local variables here // Input/Output Ports initialization // Port B initialization // Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00; DDRB=0x00; PORTD=0xFF; DDRD=0x00; // Timer/Counter 1 initialization // Clock source: System Clock // Clock value: 7,813 kHz // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off // Input Capture on Falling Edge // Timer 1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: On // Compare B Match Interrupt: Off TCCR1A=0x00; TCCR1B=0x05; TCNT1H=0x00; TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x1E; OCR1AL=0x85; OCR1BH=0x00; OCR1BL=0x00; // External Interrupt(s) initialization // INT0: On // INT0 Mode: Rising Edge // INT1: Off GICR|=0x40; MCUCR=0x03; GIFR=0x40; // Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=0x10; // Global enable interrupts #asm("sei") lcd_init(8); while (1) { sprintf(lcd_buf,"freq=%d",freq); lcd_gotoxy(0,0); lcd_puts(lcd_buf); }; } |
Прошивка и схема доступны здесь.
Добавить комментарий


если any change то будет удвоенную частоту считать
Спасибо большое!
Привет Админ!
Есть такой вопрос, например я скачал готовый проект, с исходниками и с уже сгенерированными hex или rom файлом, вопрос, как узнать на какой частоте должен работать МК? например если я скачал проект ИК пульта, он должен работать на частоте 4 МГц, если я поставлю кварц на 1 мгц там же другие сигналы будут, соответсвенно пульт не будет правильно работать, как узнать на какой частоте должен работать МК?
можешь посмотреть в файле *.asm
«можешь посмотреть в файле *.asm»
Как это сделать, скажите пожалуйста
из хекса тактовую насколько мне известно никак не достать.
А как посмотреть в ASM файле?
откройте текстовым редактором и посмотрите, если вам повезет, то в самом начале будет комментарий, если нет то тоже никак
Спасибо
А можно ли данный материал использовать в измерении cos fi?.В электротехники это коэффициент реактивной мощности .Или лучше режим захвата?